
Development Model of Skylab Serpentuator Arm, dated Jan. 3, 1969. Found at: https://commons.wikimedia.org/wiki/File:Serpentuator.jpg
Sometimes curiosity can be sparked by a single image. Last week, a member of Space Hipsters posted a black and white, grainy, late 1960s photo of something called the “Serpentuator,” which I’d never heard of before in my life. But apparently, I needed it in my life. The photo, dated Jan. 3, 1969, added by user Ke4roh on Wikimedia Commons, has a caption that states:
“The Serpentuator is a 40-foot long articulated arm to aid astronauts on extravehicular activities with moving equipment and astronauts to particular locations outside Skylab. The Canadarm serves a similar purpose on the Shuttle, though it is not as dexterous. This photograph shows the Serpentuator at Marshall Space Flight Center flat floor facility of building 4711 set to be tested in two dimensions on air bearings in a manner similar to air hockey. At the near end of the Serpentuator is a 5 degrees of freedom (5DF) chair which allows a person strapped in to translate freely in two dimensions as well as roll, pitch, and yaw. The switch bank to the right of the chair controls the Serpentuator. Things that look in this picture like jellyfish provide air bearing support along the length of the Serpentuator. NASA caption: Serpentuator … straight, tip control out for viewing, inboard view. Photographer Moss.”(This image is sourced to the book/DVD Wernher von Braun, The Rocket Man: His Weekly Notes, 1961-1969, editedand researched by Ed Buckbee, released in 2010).
Naturally, I started scratching my head, wondering more about the thing that resembled a school of jellyfish rather than the sleek “robotic arm” we’re used to seeing on the Space Shuttle and the ISS. Turns out, the “Serpentuator” (comes from the words “serpent” – the device resembled a snake – and “actuator”) was a part of Skylab before Skylab even became Skylab, if that even makes sense.
A document called the Historic American Engineering Record, Neutral Buoyancy Simulator (NBS) facility (HAER No. AL-129-B) lightly touches on the arm that was meant to automate activities from a space station designed during the Apollo Applications Program (AAP):
“The history of the RMS [Remote Manipulator System] is another example of resourcefulness by the NBS staff… Long before the Space Shuttle, Hans Wuenscher of Marshall’s [Space Flight Center] Manufacturing Engineering Laboratory conceived a manipulating device to aid in assembling structures in space. Called the ‘serpentuator’ because of its snake-like shape, the device was intended to handle tools, equipment, and men in space. One problem faced by its developers was how to test it. Because it was designed for weightless space, it could not even support itself against Earth’s gravity, much less function. It was perfect for an early functional test of neutral buoyancy, and around 1967, a small serpentuator was built and tested in the neutral buoyancy tank that preceded the NBS.”
The document continues to elaborate that a device called a “teleoperator” was designed in 1971 by Marshall and Bell Aerospace Company for use on the Shuttle, but neither device went further than the test stage; Skylab never received its robotic arm. But why?
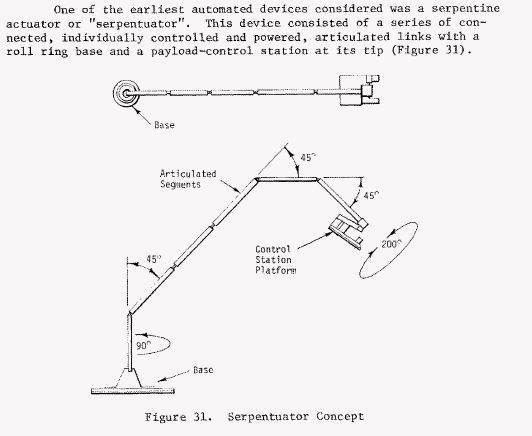
Marshall released a Skylab Extracurricular Development Report in Dec. 1974, which contained further information about the intriguing arm, including diagrams. This publication emphasized that the “device consisted of a series of connected, individually controlled and powered, articulated links with a roll base ring and a payload-control station at its tip.” The arm would “pick up” an astronaut and seven film magazines, delivering them to the Apollo Telescope Mount. The publication stated while the idea was very complex and heavy (especially for 1967 – keep in mind the U.S. hadn’t yet sent men to the Moon), it was widely favored over other “boom concepts” at the time. (Other systems to automate EVAs, including using “roll-up” rails and booms to send an astronaut to a desired location, were also discussed and studied.)
Too Ahead Of Its Time?
It bears mention at that time there were plans to have several space stations in Low Earth Orbit under the auspices of AAP, and the ATM would have been launched separately – based on the Lunar Module design, it would’ve docked with the space station at a later time. Also in 1967 Skylab was still a “wet workshop,” meaning it would be repurposed in space from a flown rocket. (There were many wild plans for AAP, including but not limited to a human-helmed mission to Venus; at the time, budgets seemed limitless.) In 1969 it was decided Skylab would fly “dry” and integrated, in one piece, inside a Saturn V. (To this day, I believe Skylab was still the largest single object launched into orbit, but if I’m wrong please correct me.) By 1970 Skylab became Skylab – but it carried over some reminders of the time when it was a wet workshop, most prominently the “gridded floors” for fuel transfer. Budget cuts forced AAP to devote its energies into the Skylab program and what came after – the Apollo-Soyuz Test Project, ASTP, which flew in 1975.
The idea for a Serpentuator died too; according to the 1974 MSFC Skylab EVA Development report, the first robotic arm “was rejected as a crew and cargo transfer device because of its considerable weight and complexity and the requirement that any mechanically augmented translation device have a manual backup capability.” Instead of using the futuristic science-fiction dream of an arm, astronauts would make do with a simpler (yet more reliable) system of hand rails and foot holds. (Of course, not all of the EVAs for Skylab involved servicing the ATM, and were not routine…but that’s a story for another time.) The world would have to wait for a robotic arm in orbit until 1981, when Columbia first launched.
Emily Carney is a writer, space enthusiast, and creator of the This Space Available space blog, published since 2010. In January 2019, Emily’s This Space Available blog was incorporated into the National Space Society’s blog. The content of Emily’s blog can be accessed via the This Space Available blog category.
Note: The views expressed in This Space Available are those of the author and should not be considered as representing the positions or views of the National Space Society.









1 thought on “In Search Of…Skylab’s Lost Robotic Arm”
> I believe Skylab was still the largest single object launched into orbit
Echo 1 and 2 were both single-launch objects bigger than Skylab. Heck, Echo 2 had 36x the pressurized volume as ISS.
As a rule of thumb, Echo and the Westford Dipoles beat virtually all LEO records other than weight.