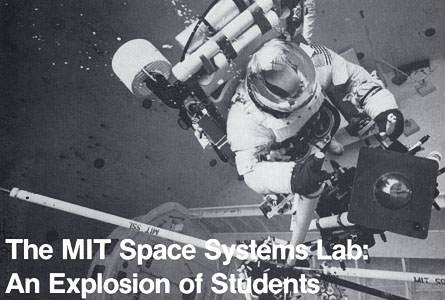
A student from MIT Space Systems Laboratory does an underwater simulation of the assembly of a large space structure at the NASA Marshall Space Hight Center Neutral Buoyancy Facility. The student wears a Skylab pressure suit; the mobility backpack and the beams and joint clusters being assembled were designed and built by students in the SSL. (Photo by Dennis Kelm of the NASA Marshall Space Flight Center.)
by David G. Stuart
From L5 News, October 1983
The MIT Space Systems Laboratory (SSL) was founded in 1975 by Professor Rene H. Miller. Beginning with three students, it has grown over the years to include seven faculty members and roughly sixty students working on projects related to space development. This article traces the major steps in the explosive growth of this lab, and describes its current work in this field.
The SSE has become one of the laboratories in the MIT Department of Aeronautics and Astronautics, but at its inception it was only the “Space Systems Office,” as announced by the hand-lettered sign taped to the door (What’s a space systems?” was the usual reaction). Behind that door worked two new graduate students, David L. Akin and David B.S. Smith, and a freshman, Carolyn S. Major. The H. N. Slater Chair of Flight Transportation, held by Professor Miller, covered salaries and expenses.
The “Systems” in SSL refers to systems analysis, which is both the foundation and goal of much of the lab’s research. In formal terms, systems analysis is the quantitative evaluation of alternative future scenarios. In English, this means trying to understand how pieces of a large program contribute to its overall cost, and how strongly each piece affects that cost; systems analysis then tries to find the optimum compromises between those pieces, to keep overall cost at a minimum.
The application of systems analysis which launched the Space Systems Laboratory was a study of the solar power satellite (SPS) which examined how early SPSs might he put into orbit from Earth. The cost of such a program has many components: research and development of SPS, manufacture of SPS parts, development and manufacture of launch vehicles, establishment of a construction site in orbit, operation of the launch vehicles, salary and consumables for the construction crew in orbit, maintenance and repair of construction equipment, support functions on the ground, interest on early investment in the project, and so forth. Many of these cost components cannot be accurately predicted ten years in advance, but a likely range of values can generally be estimated (for example, “the research and development of the SPS will cost between ten and thirty billion dollars”).
The relationships between these component costs and overall program cost are expressed as a set of equations, in which the uncertain cost components appear as variables. Each variable is then allowed to take on values across its range, to map out the effect of that variable on the overall cost. “Exercising the math model,” as this process is called, gives the systems analyst several results: It identifies the principal contributors to the program cost; it identifies those variables which need detailed study, because as they take on values across their ranges they cause large changes in overall cost; and it indicates in which direction each variable should move to reduce the total cost.
In this analysis of the SPS, Professor Miller and Dave Akin found that two critical variables dominated the program cost: cost to launch from Earth to low-Earth-orbit ($/kg), and productivity of the orbital construction crew (kg of assembled SPS per person-hour). The launch cost depends on the design of the launch vehicle, the launch rate, the total payload to be carried, and a variety of other factors; lower launch costs translate directly into lower program costs.
Human productivity in space, however, has a more complex effect: if the productivity falls much below 25 kg / person-hour, then labor costs become a major part of total cost, and higher productivity becomes very desirable. If it is above 25 kg / person-hour, however, the construction crew remains small enough that their cost is a small part of the program. In that case, higher productivity, while still desirable, is not as important to achieve as lower launch costs.
Since information on human productivity in space was almost nonexistent, the SSL decided to focus on this issue, and to develop experiments to predict that productivity. Thus, much of the lab’s research has been suggested by systems analysis: its results are being used to develop more accurate values for variables in the cost equations.
While doing this early systems analysis and background research on productivity on Earth, members of the SSL were also involved in other activities. For example, in the spring of 1976, they were part of a course project that designed the MIT Prototype Space Colony. Also at this time, Professor Gerard K. O’Neill held a one-year Hunsaker Visiting Professorship at MIT, with an office down the hall from the Space Systems Office. Since Gerry often worked at home, one of our more entertaining duties was receiving some of Gerry’s would-be visitors. They ranged from serious professionals, through wild-eyed inventors (each with a better colony design or an anti-gravity launch system), to representatives of mystical organizations: one was a strip-tease dancer from Kansas. Most of them, as Dave Akin put it. “were ready to leave for the colony next Thursday.”
In 1977, Professor James W. Mar (codirector of the lab with Professor Miller) obtained a grant from NASA Headquarters to support students working on space development: the SSL was on the map. The students immediately moved seven desks into Professor O’Neill’s now-vacant office, establishing an SSE tradition of maximum packing density for students.
The SSL soon bid on two NASA research contracts on use of lunar materials for SPS construction. University laboratories seldom compete directly with industry, and the members of the SSL were therefore slightly surprised when the lab won one of the contracts. In one leap this more than doubled the budget and the population of the SSL. There were now roughly fifteen students in the lab (but still at seven desks).
The resulting work on the design of a space manufacturing facility (SMF) has been described in an earlier L-5 News article (“Off-Planet Industry,” March 1980). Reprinted from that article, Figure 1 shows part of the SMF: the solar cell factory, which uses vapor deposition to build up solar cells layer by layer.
Figure 1: Solar Cell Factory Perspective View. A perspective view of part of the SMF shows the vapor deposition sections of the solar cell factory. The 1.1-meter-wide belts travel through vapor deposition sections, where solar cell material is built up in layers. Further down the production line, individual cells are cut and interconnected into panels and arrays.
As a result of the SMF contract the SSL reached several major conclusions. First, large-scale manufacturing in space is technically feasible. Second, the space environment suggests “space-specific” manufacturing processes (such as vapor deposition), seldom used on Earth, but “natural” in orbit. Third, use of automation and robotics will likely be substantial in such projects, because it allows human productivities well above the 25 kg person-hour figure mentioned above. With help from considerable machinery, the SMF production crew of 440 (220 people in production, 220 people in support) has a planned productivity of 150 kg / production-person hour, well above the typical Earth figure of 6 kg / person-hour for refrigerator manufacture.
Meanwhile, the SSL tackled the issue of human productivity in assembling space structures. Although it was a spectacular achievement, the deployment of the Skylab sunshade took place with abysmally low productivity, not surprising for a quickly-implemented contingency repair which had to work the first time. The SSL wanted to simulate future space construction more realistically. On Earth, the only way to simulate zero-g assembly of large structures is underwater, with test subjects, structures, and tools made as neutrally buoyant as possible. At MIT this meant using the alumni swimming pool on those few Sundays when it wasn’t filled with splashing bodies.
Within the SSL, the LOOP Group (“pool” spelled backwards; officially, the Lab of Orbital Productivity) began work on neutral buoyancy simulations. Alter some preliminary theory and experiments on human body dynamics, the LOOP group concluded that if each beam to be assembled underwater massed more than 20% of the body mass of the test subject, then the water drag effects were sufficiently low that the simulation was realistic. The students therefore designed, built, tested, fixed, and rebuilt appropriate hardware, and began assembly simulations. To keep test subjects from swimming (an instinctive reaction strongly affecting measured productivities), a variety of restraint techniques were developed, such as strapping the hapless subjects to plywood hoards. More than half the lab became scuba-rated to perform or assist in the simulations.
The early results were surprising: test subjects did better underwater than on the ground. The two key factors were equipment design and learning. The hardware was designed to be manipulated in neutral buoyancy using gloves simulating pressure suit gloves; a special joint was designed for ease of assembly and disassembly. Further, the test subjects rapidly improved their performance because they invented more efficient procedures, and because they developed an instinctive ability to torque themselves and pieces of equipment against each other, so that when motion ceased everything and everyone was lined up to assemble the components.
One problem was that, as the test structures became more complex and therefore more realistic, they also became larger, as show n in Figure 2. Also, skeptics pointed out that the simulations did not include the reportedly severe restraints inherent in the actual pressure suits used in space. These factors limited what could be done at MIT.
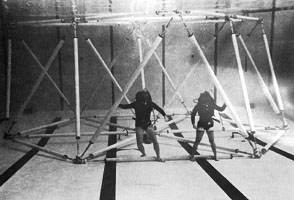
Figure 2: The early structures built in the MIT swimming pool eventually grew to fill the deep end. Here Dave Akin and Mary Bowden float in front of a 36-beam tetrahedral truss structure. Photo courtesy MIT SSL.
The SSL’s big break in this area came in 1978, when the cancellation of another briefing gave the lab a chance to present its work to NASA’s Management Council, which included NASA Administrator Robert Frosch, Deputy Administrator Alan Lovelace, and representatives of the major divisions within NASA. With two professors, eight students, two hours, some nervousness, and lot of view-graphs, the SSL described its projects. The group was attentive and favorable, and expressed surprise at the extent and depth of the work, considering the low cost (students work cheap). Al Lovelace declared the underwater simulations a “natural” for the Neutral Buoyancy Facility at the NASA Marshall Space Flight Center in Huntsville, Alabama.
T he Neutral Buoyance Facility (NBF) is a large cylindrical tank, 75 feet in diameter and 40 feet deep, filled with crystal-clear water. A full-size mockup of the Shuttle payload bay lies on the bottom. Test subjects wear A7LB pressure suits tailored for the Skylab astronauts. Two pressure-suited subjects can work underwater at the sane time, with a support crew of nineteen, in and out of the water.

Figure 3: The NASA Marshall Neutral Buoyancy facility features Skylab pressure suits, a mockup of the Shuttle payload bay, and enough room for very complex structures. Note the safety divers and the movable low platform for the test subject. Mom courtesy NASA / MSFC.
As shown in Figure 3, the SSL wasted no time in filling even this tank with simulated space structures. Although the pressure suits were indeed bulky and restrictive, the test subjects learned to adapt, eventually surpassing the productivities measured in the M IT pool; they reached 800 kg / person-hour on exceptional runs. The structures became more complex and realistic, including bracing cables, large containers simulating equipment packages, and stretched nets simulating solar cell arrays or reflectors. The LOOP Group became regular customers at the Marshall NBF, with three-week test sessions twice per year, in January and during the summer.
The SSL also began to develop underwater assembly aids, to simulate the use of similar aids in space. One was the Personal Underwater Maneuvering Apparatus (PUMA), an underwater equivalent to the astronuat’s Manned Maneuvering Unit (see Figure 4). This backpack uses electrically-driven propellers to move and portion the test subject, controlled by joysticks on the PUMA’s “arms”. Several versions of the PUMA have been designed, with the eventual goal of a battery powered, gyro-and-computer-controlled unit which will behave as if water drag were absent.

Figure 4: Mary Bowden assembles two beams and a joint cluster while nearing the Personal Underwater Maneuvering Apparatus. Note the PUMA’s ducted and grill-covered propellers and the “arm” on which are mounted the motion controls. Note also the Head-Up Display mounted on Mary’s helmet.
Other assembly aids included: a one-propeller Hand-Held Maneuvering Unit, reminiscent of the mobility pistols tested in Gemini spacewalks; foot-restaint platforms, allowing the test subject to be positioned around the structure (see Fig. 3); and a Head-Up Display to give the test subject useful information (see Fig. 4). Test subjects from NASA (including some astronauts) and from the Air Force have also used the SSL’s equipment in the NBF.
During this time the SSL expanded in other directions; under the guidance of Professor James W. Mar, the Structures In Space Group began to study structural dynamics, material properties, and alternative designs for large space structures. Several joint efforts were started between the SSL and the Technology Laboratory for Advanced Composites, including the fabrication of graphite epoxy beams for the underwater tests. Under the impetus of Professor Edward Crawley, the scope of the structures research was broadened to include controlling vibrations in large space structures. The group is now called Control and Response of Structures in Space (CRSIS).
In its space manufacturing facility design work, the SSL had been impressed by the potential of vapor deposition as an industrial process in space. An experimental group formed to explore the physics of this process, under the direction of Professor Harold Wachman. However, due to difficulties in getting this work separately funded, the SSL has shelved this research for the moment. Another scientific project in the lab is a study of combustion in zero-g, under Paul Roney’s award-winning acronym of GRIEF (Gravity’s Role in Ignition Energy and Flammability). Using a drop tower at the NASA Lewis Research Center in Cleveland, Ohio, Paul has discovered a new kind of combustion process, probably unfindable except in zero-g.
When the systems analysis mentioned earlier was extented to include lunar materials for SPS construction, it indicated a substantial cost savings if lunar materials could serve as propellant for orbit transfers above low-Earth orbit, particularly if these materials were used in high-efficiency thrusters, such as ion engines. Under the supervision of Professor Manuel Martinez-Sanchez, a Space Propulsion Group (SP) was therefore established to build an ion engine able to use oxygen as propellant. The group’s focus has since broadened to include theoretical and experimental research on magnetoplasma-dynamic thrusters, which could prove useful in a wide range of space operations.
To house all this activity, the SSL moved its seven desks into a much larger office and brought in twelve more desks from places better not known. The lab also set up mechanical and electronic work areas in several shops and laboratories and began to buy computers.
In 1981, the SSL won a NASA Marshall research contract on Automation, Robotics, and Machine Intelligence Systems (ARAMIS). In its first year, this study systematically reviewed tasks to be done in space in the years 1985-2000, and ARAMIS options for doing them. For example, for the task Position and Connect New Component, the study identified eight ARAMIS options, ranging from the fully human (Human in Pressure Suit with Tools) to the fully machine (Computer-Controlled Dextrous Manipulator with Vision and Force Feedback). The study also evaluated the relative merits of the options and made specific recommendations for future ARAMIS research by NASA.
In its second year, the ARAMIS study has concentrated on telepresence, defined as teleoperation with sufficient dexterity in the manipulators and sufficient kinds and quality of sensory feedback to give the operator a feeling of actual presence at the remote worksite. The study has suggested a near-term telepresence unit which NASA could build and test from the Shuttle.
The ARAMIS study has concluded that automation, robotics, and machine intelligence systems have a substantial role to play in future space operations. In most cases, the goal is not to replace humans with machines, but to form an efficient, cost-effective partnership between humans and machines. For example, a construction site may use a mix of automated equipment for repetitive production work, teleoperators for simple assemblies, and humans in pressure suits for tricky assemblies or unforeseen operations. We do not face an either-or decision between humans and machines; they provide a spectrum of abilities.
Another conclusion of this study was that “intelligent” computers could be valuable in certain space activities, such as monitoring space station systems and diagnosing failures in spacecraft. Such computers might also help in launch procedures at Kennedy Space Center, but this requires more careful study. A strong recommendation by the ARAMIS group was that NASA should develop space-qualified microprocessor chips; such chips will make possible a wide range of useful space technologies, such as fault-tolerant spacecraft, dextrous teleoperators, automatic sensors, human-machine interfaces, and active control of large space structures.
Bridging both the underwater simulations of space assembly and the ARAMIS research on telepresence, the LOOP group is building a Beam Assembly Teleoperator (BAT), as shown in Figure 5. This device starts with a mobility frame like the PUMA, but substitutes a pair of manipulator arms and a TV camera for the astronaut. It will be used to build the same underwater structures as the test subjects, to identify tasks better performed by humans, by teleoperators, or by combinations of both. It will also develop teleoperator technology for tasks too dangerous for or or too expensive for humans to reach.

Figure 5: John Spofford stands next to the Beam Assembly Teleoperator (BAT), which consists of a mobility frame (a modified PUMA) and two mechanical arms. The left arm is a simple claw design; the right arm has five degrees of freedom, and a geometry close to the human arm. At the top of the unit is a TV camera, which can tilt and pan across the work area. John is the electronics designer for BAT.
The BAT does not need to be symmetric for its job. The simple left arm will grab and move beams in one direction only; the more complex right arm will grab and assemble the structure’s joints. The BAT is mechanically and electronically complex, and designing a comfortable control station will also pose a challenge.
Looking ahead, the SSL is involved in experiment definition, hardware design and construction, and scientific support and data analysis for two Shuttle experiments. Supervised by Professor David Akin, the LOOP Group is working on Experimental Assembly of Structures in EVA (EASE), and Structural Assembly Demonstration Experiment (SADE), both on upcoming shuttle missions. These will investigate techniques and hardware to assemble structures extending from the Shuttle payload bay, and will provide data relating productivities and learning rates in space to those underwater.
The SSL also hopes to set up a teleoperator simulation facility at MIT, and to develop joint projects with the Man-Machine Systems Lab, the Artificial Intelligence Lab, and the Man-Vehicle Lab, all at MIT. Several other areas of research in the SSL are likely candidates for Shuttle experiments.
Today, the SSL, includes seven professors, some twenty graduate students, and roughly forty undergraduates. The latter work under MITs Undergraduate Research Opportunities Program (UROP), which gives academic credit, or in some cases money, to undergrads doing research directly with faculty and grad students. The interest of incoming students in space continues to grow, and the SSL seems likely to remain MIT’s largest employer of UROP students. Besides the busy workload, the SSL, also has an active social life, which has so far led to three marriages within the lab.
Although the average age of the SSL population has risen since 1975, new ideas still lead to new proposals for grants and contracts, and eventually to new equipment to build and test; SSL hardware will soon fly on the Shuttle. With 90% of the lab personnel hoping to get into space, it’s only a matter of time before one of the lab members leaves the planet. Eventually, the SSL’s main office may be in zero-g — that’s the only way we’ll cram more desks into it.
David G. Stuart (formerly David B. S. Smith) is a Research Assistant in the MIT Space Systems Laboratory. He is working toward a doctoral degree, studying the economics of humans and machines in space.